1. 数学基础(平移、旋转、缩放矩阵)
1. 数学基础(平移、旋转、缩放矩阵)
# 数学基础(平移、旋转、缩放矩阵)
本下节课给大家介绍下矩阵的概念,以及用于几何变换的矩阵,比如平移矩阵、缩放矩阵、旋转矩阵。
如果你对这些几何变换的矩阵概念比较熟悉,可以跳过本节课。
# 线性代数、图形学
如果你有《线性代数》、《计算机图形学》基础,更有利于WebGPU的学习。当然了,你没有这些基础,也没关系,咱们课程的特色就是尽量弱化对数学和图形学基础的要求,尽量带你从零入门。
如果你时间比较充足,也有兴趣,可以去翻翻《线性代数》、《计算机图形学》相关的书籍,当然你不去翻,咱们的课程你也能学习。
如果你数学基础不好,工作也不用封装3D引擎或数学库,可以不用学习《线性代数》,直接用下节课介绍的一个数学库即可。
# 本节课针对学员
- 大学学过线性代数的矩阵,但是并不了解用于平移、旋转、缩放的矩阵
- 没学过线性代数,数学停留在高中水平
# 矩阵、矩阵运算规则
矩阵 (opens new window)是图形学中一个比较重要的数学工具。
m×n矩阵表示m行n列的矩阵。

# 平移矩阵
下面咱们不会严格逻辑推导数学公式,用不严谨的小白方式,给大家介绍下平移矩阵。
一个点的坐标是(x,y,z),假设沿着X、Y、Z轴分别平移Tx、Ty、Tz,毫无疑问平移后的坐标是(x+Tx,y+Ty,z+Tz)。
坐标是(x,y,z)转化为齐次坐标坐标是(x,y,z,1),可以用4x1矩阵表示,这种特殊形式,也可以称为列向量,在webgpu顶点着色器代码中也可以用四维向量vec4表示。
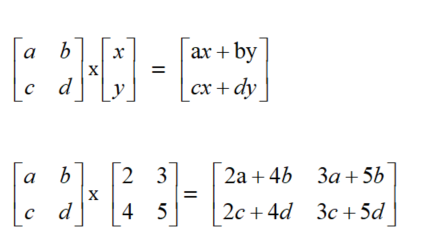
请用矩阵的乘法运算法则验证下面矩阵的等式是否成立?

# 缩放矩阵
通过缩放矩阵可以对顶点的齐次坐标进行缩放。

# 旋转矩阵
假设一个点的坐标是(x,y,z),经过旋转变换后的坐标为(X,Y,Z)
绕Z轴旋转γ角度,z的坐标不变不变,x、y的坐标发生变化,如果你有兴趣,可以用你高中的三角函数知识推理,可以知道旋转后的坐标:X=xcosγ-ysinγ,Y=xsinγ+ycosγ
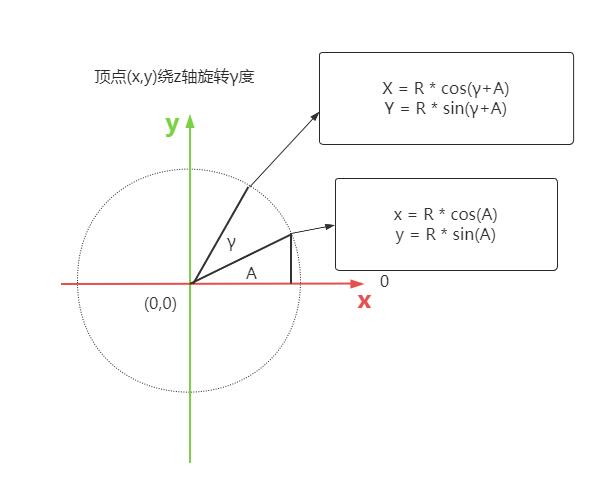
三角函数计算推理过程
// 假设旋转前角度A,对应x和y的值
x = R * cos(A)
y = R * sin(A)
// 假设旋转了γ度,对应X和Y的值
X = R * cos(γ+A)
= R * (cos(γ)cos(A)-sin(γ)sin(A))
= R*cos(A)cos(γ) - R*sin(A)sin(γ)
= xcosγ-ysinγ
Y = R * sin(γ+A)
= R * (sin(γ)cos(A)+cos(γ)sin(A))
= R*cos(A)sin(γ) + R*sin(A)cos(γ)
= xsinγ+ycosγ

旋转后的坐标:X=xcosγ-ysinγ,Y=xsinγ+ycosγ
绕X轴旋转α角度
x的坐标不变,y、z的坐标发生变化,Y=ycosα-zsinα,Z=ysinα+zcosα

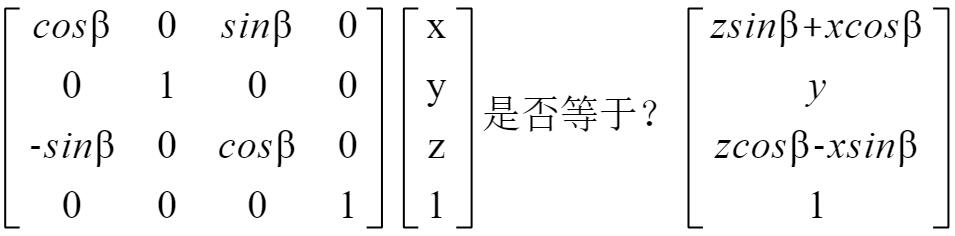
绕Y轴旋转β角度
y的坐标不变,z、x的坐标发生变化,Z=zsinβ+xcosβ,X=zcosβ-xsinβ